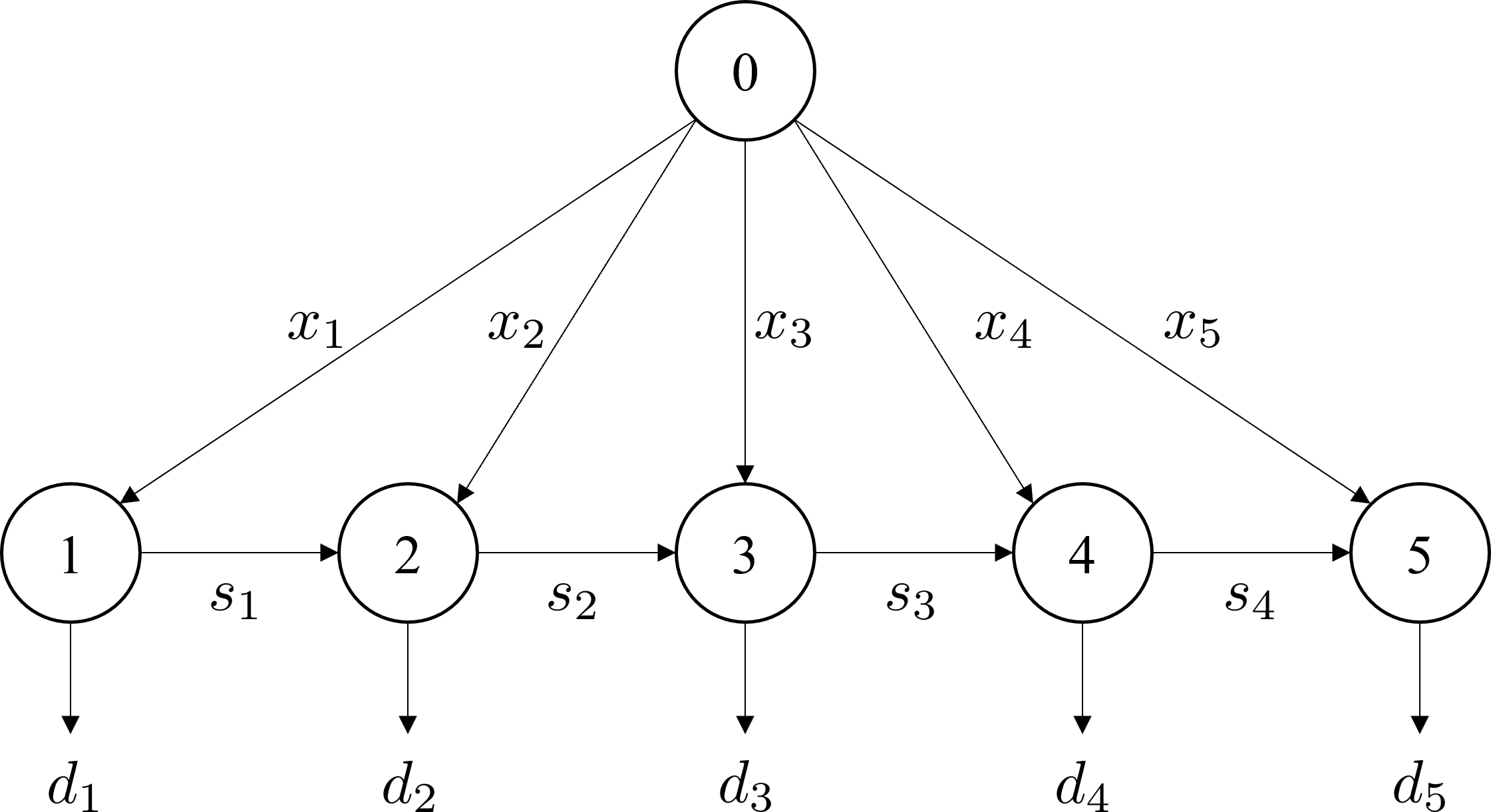
Network of Lot Sizing Problem
Network of Lot Sizing Problem
| Info. | Day 1 | Day 2 | Day 3 | Day 4 | Day 5 |
|---|---|---|---|---|---|
| Demand | 3 | 2 | 1 | 2 | 1 |
| Production cost | 3 | 0 | 1 | 0 | 2 |
| Fixed cost | 0 | 12 | 7 | 4 | 5 |
| Inventory cost | 0 | 0 | 0 | 0 | 0 |
| Info. | Day 1 | Day 2 | Day 3 | Day 4 | Day 5 |
|---|---|---|---|---|---|
| Production amount | 3 | 2 | 1 | 2 | 1 |
| Info. | Day 1 | Day 2 | Day 3 | Day 4 | Day 5 |
|---|---|---|---|---|---|
| Production amount | 5 | 0 | 1 | 2 | 1 |
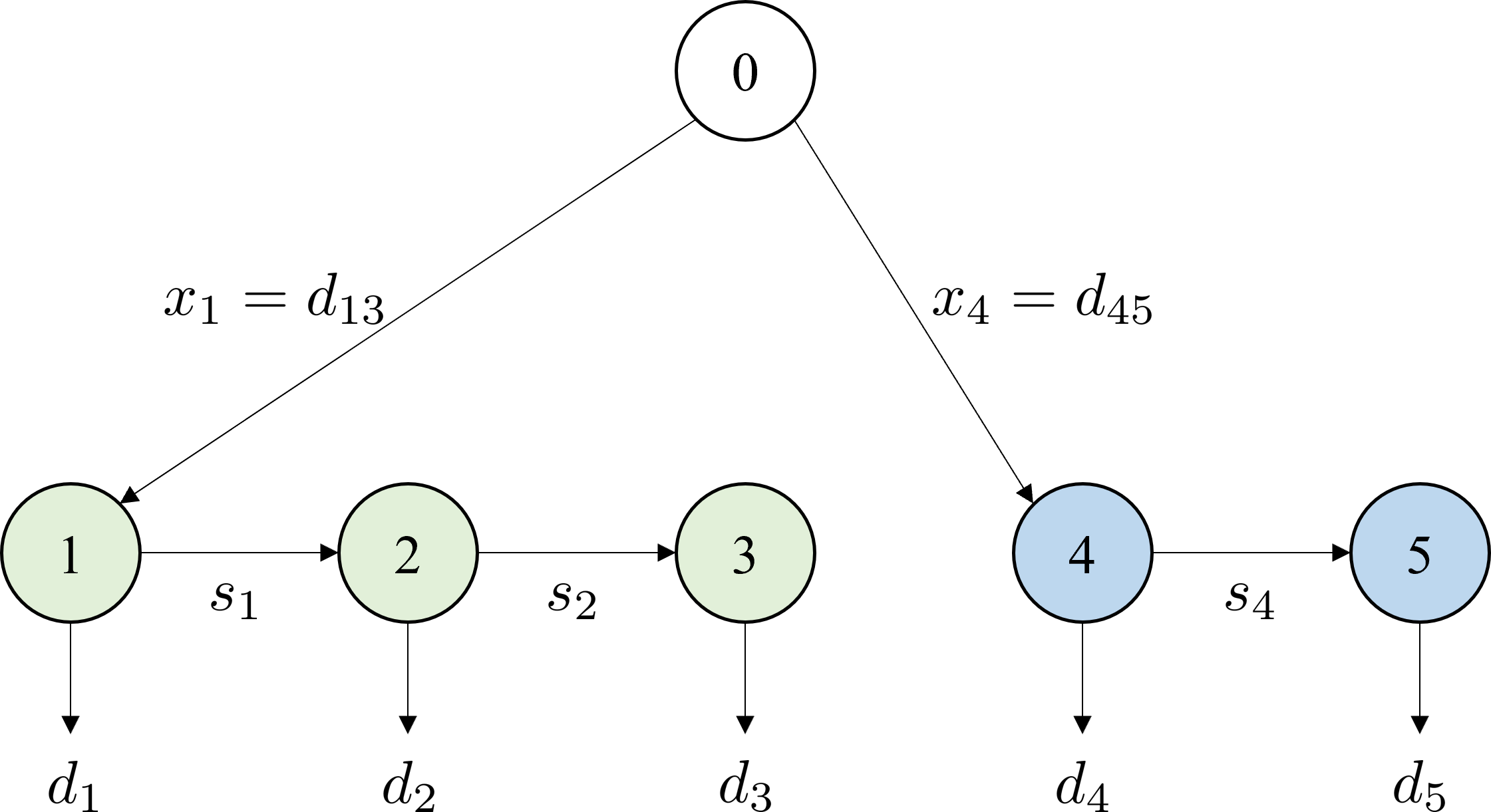
Structural characteristic of LSP optimal solutions
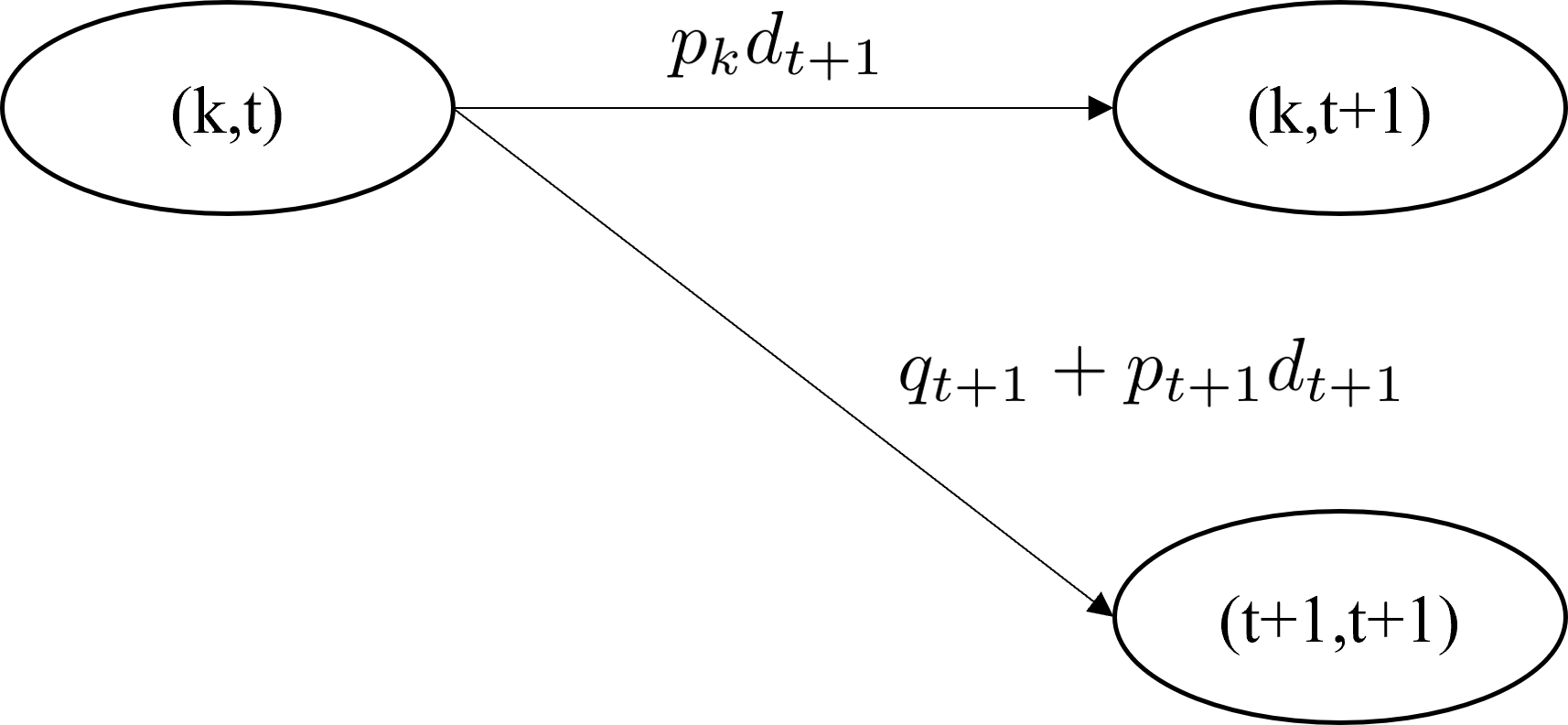
Possible actions in state (k,t)
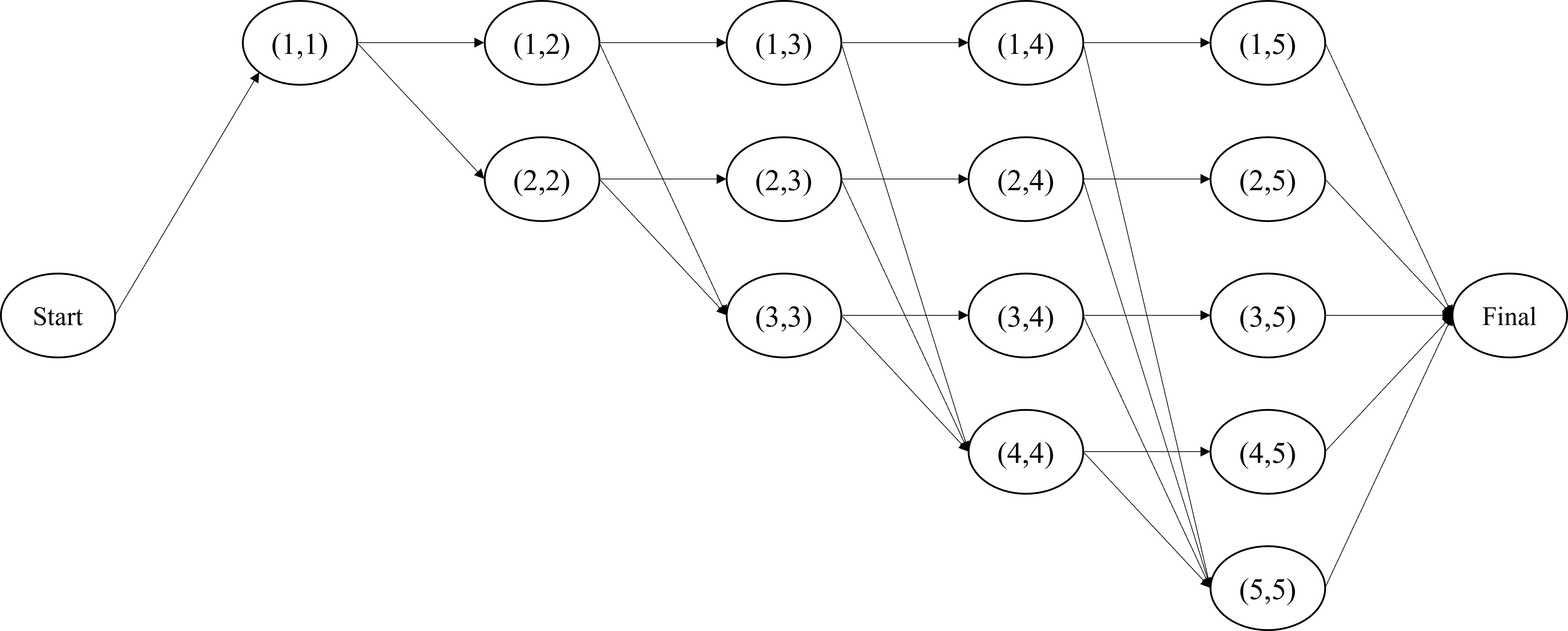
State trasition network in LSP
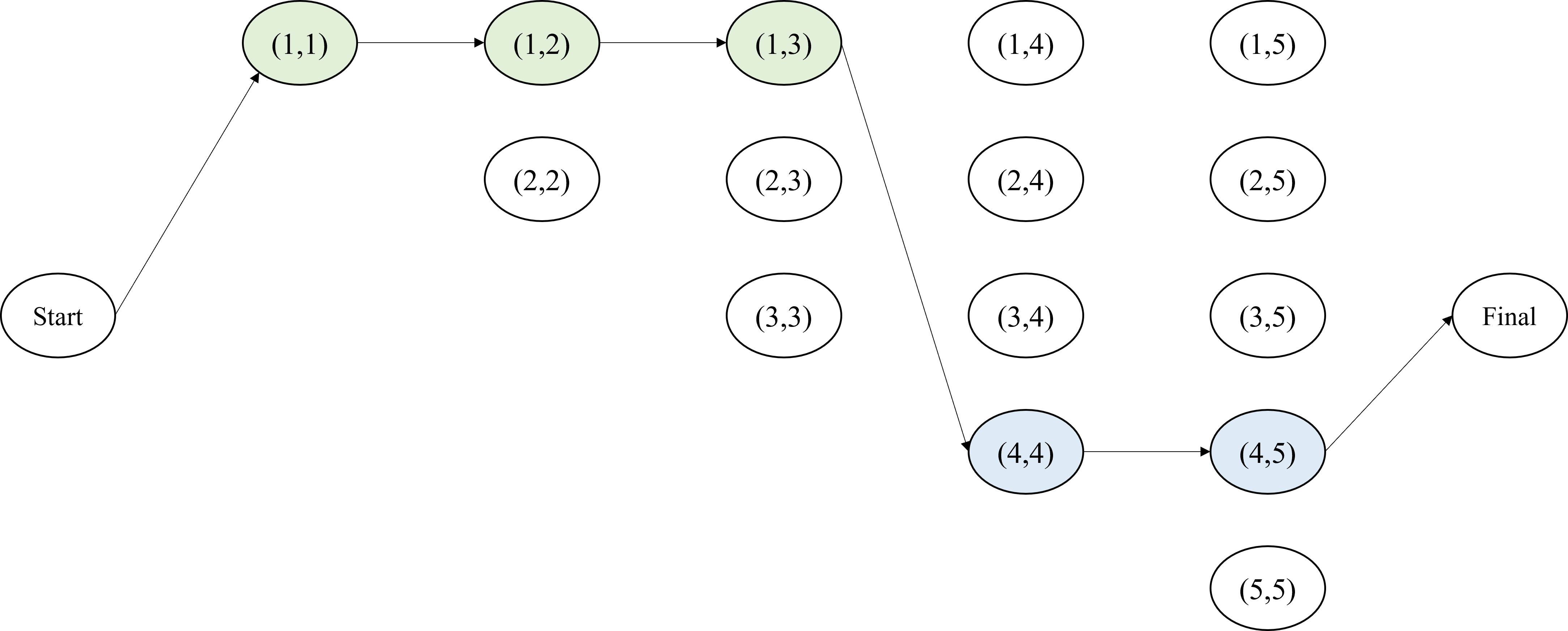
The optimal solution of the LSP and the corresponding shortest path on the network